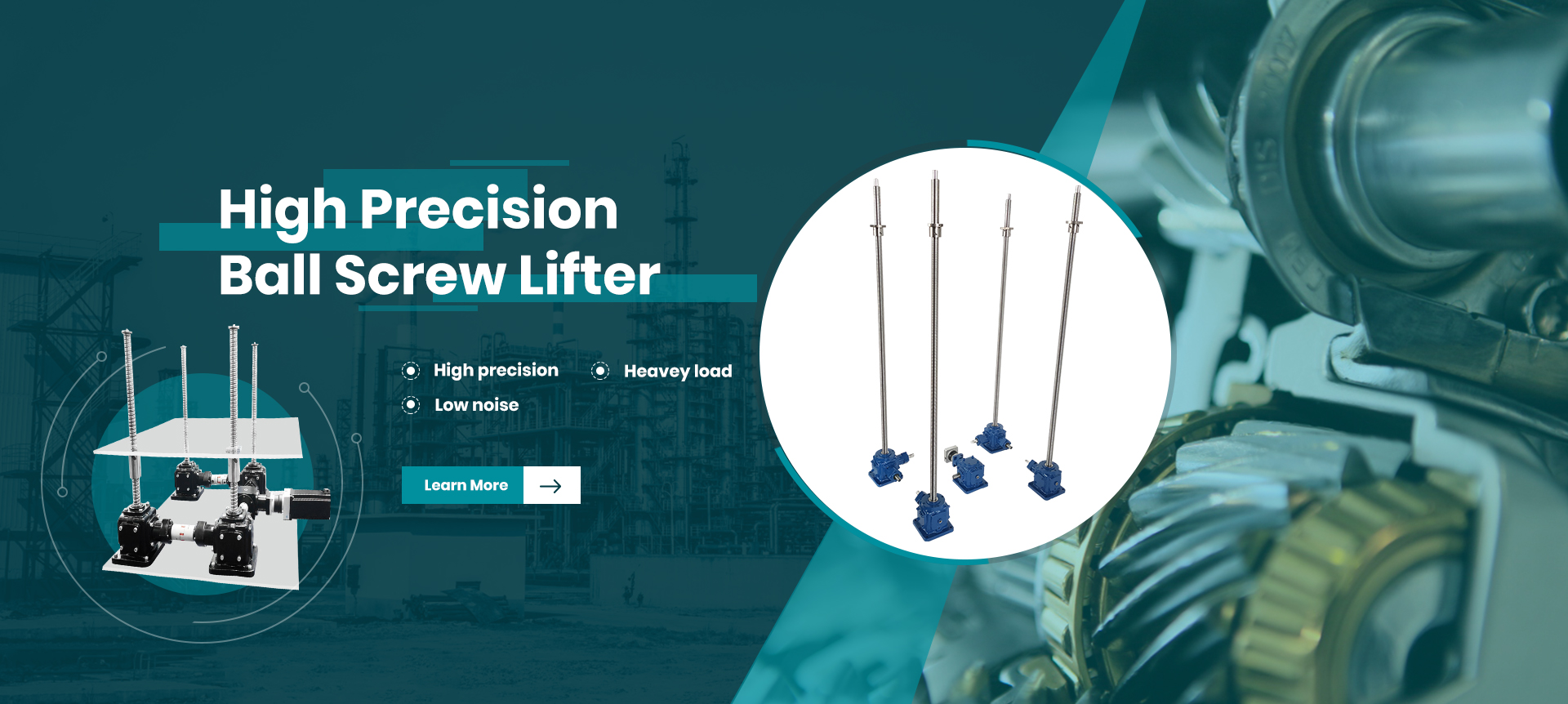

Платформа гвинтового підйомника
-

Платформа гвинтового ліфта
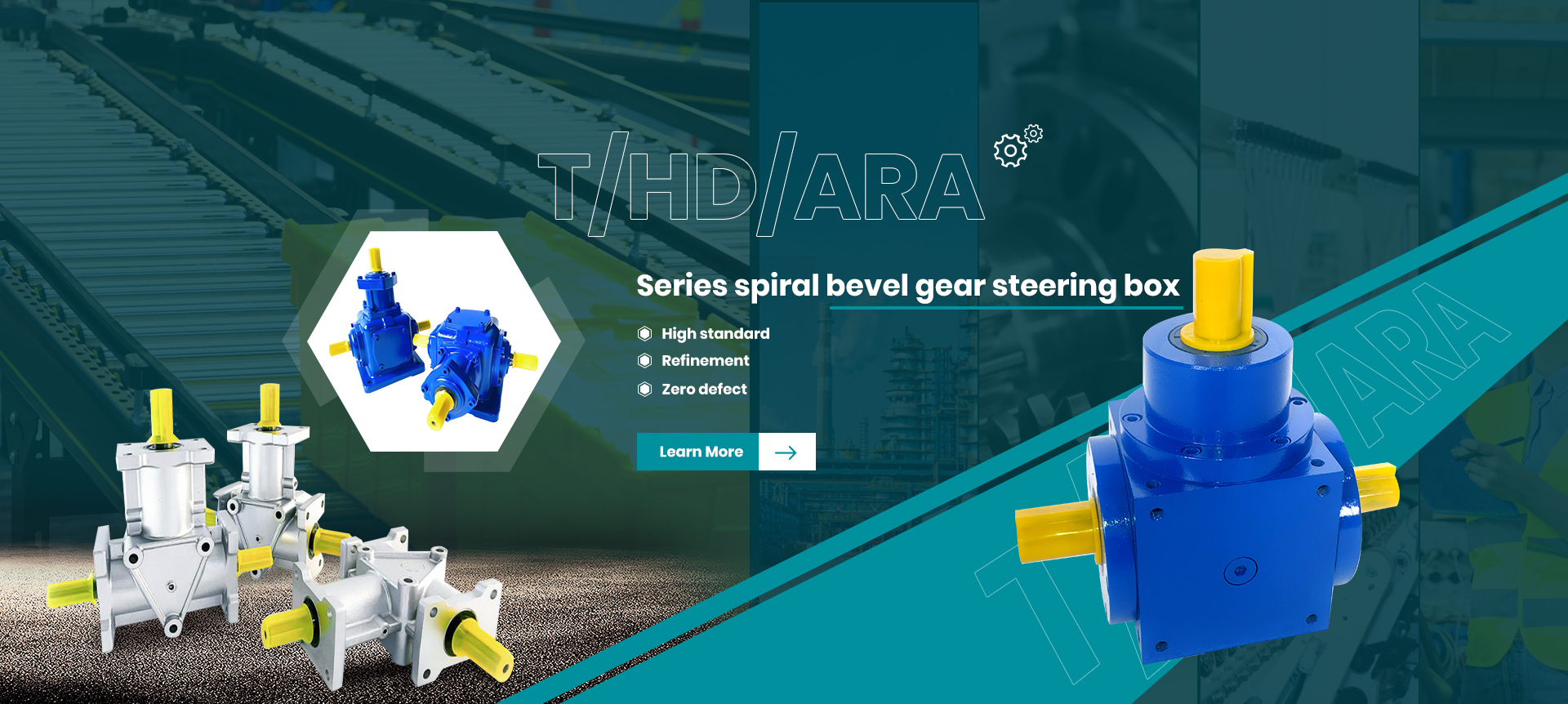
Платформа зчеплення гвинтового підйомника являє собою мехатронний блок виконання руху, який вміло поєднує двигун, редуктор, рульовий механізм і гвинтовий підйомник через муфту, вал трансмісії тощо.Він може реалізувати використання зчеплення кількох гвинтових підйомників, задовольнити вимоги багаторазового стабільного, синхронного та зворотно-поступального підйому, а також реалізувати рух перекидання.Таким чином, він може замінити традиційну гідравлічну та пневматичну трансмісію в багатьох випадках.Цей рухомий пристрій на основі черв’ячного гвинтового елеватора надає інженерам ширший практичний простір для розробки продуктів у цифрову еру.Він широко використовується в сонячній енергетиці, металургії, харчовій, водоохоронній та інших галузях промисловості.
